Prvi korak pri ostvarenju uređaja za rehabilitaciju je provođenje analize karakteristika (posebice nedostataka) postojećih komercijalno dostupnih uređaja.
Ta nam je aktivnost omogućila rad na matematičkom opisu kinematike gibanja ruke. Paraleleno s time smo proučili i anatomiju ruke.
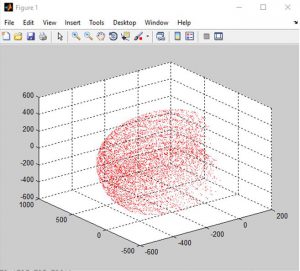
Kreiran je tako u programskom okruženju Matlab pojednostavljeni matematički model po kojem je izrađen “oblak točaka” koji predstavlja radni prostor ljudske ruke.
Cilj svih tih aktivnosti je da s mehatroničkim uređajem za rehabilitaciju obuhvatimo što veći dio radnog prostora ruke te time osiguramo funkcinalnost uređaja.