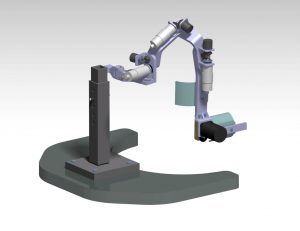
Aktivan rad na projektu razvoja visokotehnološkog mehatroničkog rehabilitacijskog uređaja nastavlja se razvojem konstrukcije cijelog uređaja koja je, kako je vidljivo, već daleko poodmakla. U tome nam je i dalje značajna podrška ZABA-a koja slijedi i naš napredak na svojim mrežnim stranicama:
Moj ZABA start: Mehatronički uređaj za rehabilitaciju ruku